Manipulatoren



Die Manipulatoren stellen eine breit anwendbare Gruppe von Handlingsgeräten dar. Die Arbeitsbereiche, in denen die Geräte zur Anwendung kommen, sind ebenso zahlreich wie verschieden. Nichtsdestotrotz lassen die wichtigsten Eigenschaften dieser Hilfsmittel eine Zusammenfassung und Entwicklung unterschiedlicher Produktgruppen zu. Basierend auf unseren Erfahrungen in mehreren Produktionsbereichen, haben wir eine Gruppe von Manipulatoren für ein Spektrum von Spezialaufgaben entwickelt.
Handling-Systeme für Schraubtechnik
Handling-Systeme spielen im Bereich der Schraubtechnik eine große Rolle. Die für Menschen meistens zu schweren Schraubwerkzeuge sind an sich bereits eine Herausforderung. Dazu kommt die Problematik der Erreichbarkeit der Schraubstelle und die erwünschte Wiederholbarkeit der Bewegungen. Der Abbau des Drehmoments ist eine weitere nicht weniger wichtige Aufgabe. Aufhängungen, Teleskope und Schwenkarme sind aus dem heutigen Schraubprozess gar nicht wegzudenken. Häufig finden diese Geräte dort ihre Anwendung, wo die Prozesse halbautomatisch, d. h. auch mit Teilnahme von Menschen ablaufen. Die scheinbare Einfachheit im Gebrauch dieser Hilfsmittel ist sehr trügerisch. Vor allem Drehmomente tragen zu der schwer einzuschätzenden Komplexität dieser Technik bei.
Teleskope
Die Anwendungsfälle für teleskopierbare Aufhängungen sind sehr unterschiedlich. In jedem Einzelfall muss die Konstruktion der Schraubaufgabe angepasst werden. Die zentrale Frage dabei richtet sich auf den Hauptzweck des Teleskops. Dient es allein dem Handling des Schraubers oder steht die Absorption der Prozesskräfte, insbesondere bei Ein- oder Zweikanal-Schraubern, im Vordergrund? In den letzten Jahren hat unser Unternehmen mehrere Dutzend solcher Systeme realisiert. Auf dem Bild rechts sehen Sie ein Teleskop mit Werkzeugaufnahme für eine Winkelspindel. Das Gewicht der Schraubspindel wird durch zwei Balancer ausgeglichen. Ein Gurt dient als Fallsicherung.
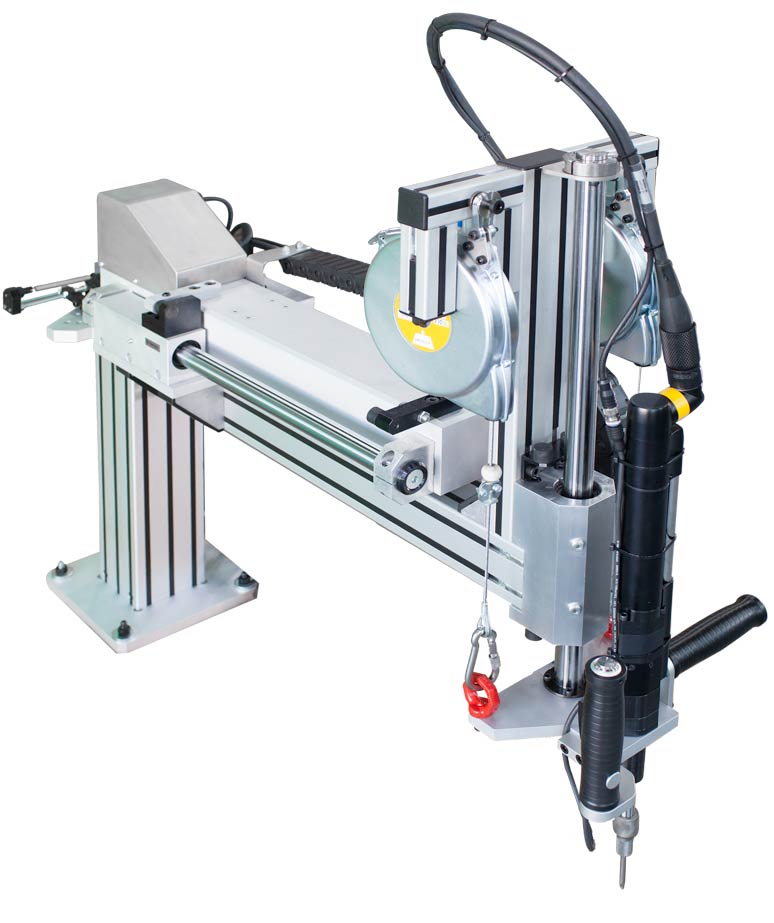
Drehmoment-Arme
Eine andere Variante des Handlings stellt einen Manipulator-Arm dar. Dabei wird eine tragende Säule auf dem Boden installiert und ein Drehmomentarm daran befestigt. In beiden Fällen braucht man keinen Gegenhalter, da die Drehmomente durch den Arm oder das Teleskop abgebaut werden. Noch komplexer werden die Konstruktionsaufgaben, wenn die Schraubstelle oberhalb der Schraubapplikation liegt. Es wird nun von unten nach oben geschraubt. Für diese Herausforderungen haben wir bereits vor Jahren viele technische Lösungen ausgearbeitet und entwickeln sie ständig weiter. Unsere Lazy-Arme sind heute in viele Prozesse, wie z. B. Verschraubungen im Unterbodenbereich der Karosserie, integriert. Bei dem unten gezeigten Drehmoment-Arm greift der Pneumatik-Zylinder den Schwenkarm. Der Druck im Zylinder wird mit der Lagenveränderung des Schwerpunktes automatisch nachreguliert und ermöglicht so eine leichte Bedienung des Armes. Eine breite Palette an Werkzeugaufnahmen für unterschiedliche Schraubspindeln oder Nietensetzwerkzeuge erweitert die Anwendungsmöglichkeiten.